22 Novembre 2022 - Stormi di robot assemblatori mostrano il potenziale per realizzare strutture più grandi. I ricercatori fanno progressi verso gruppi di robot in grado di costruire quasi tutto, inclusi edifici, veicoli e robot ancora più grandi.
I ricercatori del MIT hanno compiuto passi significativi verso la creazione di robot in grado di assemblare praticamente ed economicamente quasi tutto, comprese cose molto più grandi di loro, dai veicoli agli edifici ai robot più grandi.
Il nuovo lavoro, del Center for Bits and Atoms (CBA) del MIT, si basa su anni di ricerca, compresi studi recenti che dimostrano che oggetti come un'ala di aeroplano deformabile e un'auto da corsa funzionale potrebbero essere assemblati da piccoli pezzi leggeri identici e che potrebbero essere costruiti dispositivi robotici per svolgere parte di questo lavoro di assemblaggio.
Ora, il team ha dimostrato che sia i robot assemblatori che i componenti della struttura in costruzione possono essere tutti costituiti dalle stesse subunità e i robot possono muoversi indipendentemente in gran numero per realizzare rapidamente assemblaggi su larga scala.
Il nuovo lavoro è riportato sulla rivista Nature Communications Engineering, in un articolo della dottoranda CBA Amira Abdel-Rahman, del professore e direttore della CBA Neil Gershenfeld e di altri tre ricercatori.
Un sistema di assemblaggio di robot autoreplicanti completamente autonomo in grado sia di assemblare strutture più grandi, compresi robot più grandi, sia di pianificare la migliore sequenza di costruzione è ancora lontano anni, afferma Gershenfeld.
Ma il nuovo lavoro fa passi importanti verso questo obiettivo, tra cui elaborare i compiti complessi di quando costruire più robot e quanto grandi farli, nonché come organizzare sciami di robot di diverse dimensioni per costruire una struttura in modo efficiente senza schiantarsi l'uno contro l'altro.
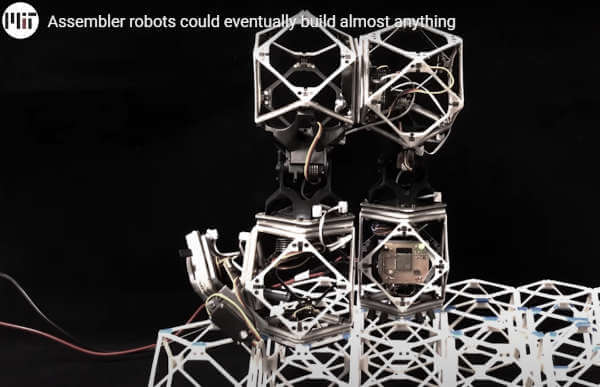
Come negli esperimenti precedenti, il nuovo sistema coinvolge grandi strutture utilizzabili costruite da una serie di minuscole subunità identiche chiamate voxel (l'equivalente volumetrico di un pixel 2D).
Ma mentre i voxel precedenti erano pezzi strutturali puramente meccanici, il team ha ora sviluppato voxel complessi che possono trasportare sia potenza che dati da un'unità all'altra. Ciò potrebbe consentire la costruzione di strutture in grado non solo di sopportare carichi, ma anche di svolgere lavori, come il sollevamento, lo spostamento e la manipolazione di materiali, compresi i voxel stessi.
"Quando costruiamo queste strutture, devi costruire l'intelligenza", dice Gershenfeld. Mentre le versioni precedenti dei robot assemblatori erano collegate da fasci di fili alla loro fonte di alimentazione e ai sistemi di controllo, "ciò che è emerso è stata l'idea dell'elettronica strutturale – di creare voxel che trasmettono potenza e dati e forza".
Guardando il nuovo sistema in funzione, sottolinea: "Non ci sono fili. C'è solo la struttura."
VIDEO
I robot stessi consistono in una stringa di diversi voxel uniti end-to-end. Questi possono afferrare un altro voxel usando punti di attacco su un'estremità, quindi spostarsi come un verme nella posizione desiderata, dove il voxel può essere attaccato alla struttura in crescita e rilasciato lì.
Gershenfeld spiega che mentre il sistema precedente dimostrato dai membri del suo gruppo poteva in linea di principio costruire strutture arbitrariamente grandi, poiché la dimensione di tali strutture raggiungeva un certo punto in relazione alle dimensioni del robot assemblatore, il processo sarebbe diventato sempre più inefficiente a causa dei percorsi sempre più lunghi che ogni bot avrebbe dovuto percorrere per portare ogni pezzo a destinazione. A quel punto, con il nuovo sistema, i robot potevano decidere che era giunto il momento di costruire una versione più grande di se stessi che potesse raggiungere distanze più lunghe e ridurre il tempo di viaggio. Una struttura ancora più grande potrebbe richiedere un altro passo del genere, con i nuovi robot più grandi che ne creano di ancora più grandi, mentre le parti di una struttura che includono molti dettagli fini potrebbero richiedere più robot più piccoli.
Mentre questi dispositivi robotici lavorano sull'assemblaggio di qualcosa, dice Abdel-Rahman, devono affrontare scelte in ogni fase lungo la strada: "Potrebbero costruire una struttura, o potrebbero costruire un altro robot delle stesse dimensioni, o un robot più grande". Parte del lavoro su cui i ricercatori si sono concentrati è la creazione di algoritmi per tale processo decisionale.
"Ad esempio, se vuoi costruire un cono o una mezza sfera", dice, "come inizi la pianificazione del percorso e come dividi questa forma" in diverse aree su cui diversi robot possono lavorare? Il software che hanno sviluppato consente a qualcuno di inserire una forma e ottenere un output che mostra dove posizionare il primo blocco, e ognuno dopo, in base alle distanze che devono essere attraversate.
Ci sono migliaia di articoli pubblicati sulla pianificazione del percorso per i robot, dice Gershenfeld. "Ma il passo successivo, del robot che deve prendere la decisione di costruire un altro robot o un diverso tipo di robot, è una novità. Non c'è davvero nulla prima di questo".
Mentre il sistema sperimentale può eseguire l'assemblaggio e include i collegamenti di alimentazione e dati, nelle versioni attuali i connettori tra le minuscole subunità non sono abbastanza forti da sopportare i carichi necessari. Il team, tra cui la dottoranda Miana Smith, si sta ora concentrando sullo sviluppo di connettori più forti. "Questi robot possono camminare e possono posizionare parti", dice Gershenfeld, "ma siamo quasi – ma non del tutto – al punto in cui uno di questi robot ne fa un altro e se ne va. E questo è dovuto alla messa a punto delle cose, come la forza degli attuatori e la forza delle articolazioni. ... Ma è abbastanza lontano che queste sono le parti che porteranno ad esso. "
In definitiva, tali sistemi potrebbero essere utilizzati per costruire un'ampia varietà di strutture di grandi dimensioni e di alto valore.
Ad esempio, attualmente il modo in cui vengono costruiti gli aeroplani coinvolge enormi fabbriche con portali molto più grandi dei componenti che costruiscono, e quindi "quando fai un jumbo jet, hai bisogno di jumbo jet per trasportare le parti del jumbo jet per farlo", dice Gershenfeld. Con un sistema come questo costruito da minuscoli componenti assemblati da piccoli robot, "l'assemblaggio finale dell'aeroplano è l'unico assemblaggio".
Allo stesso modo, nella produzione di una nuova auto, "puoi dedicare un anno agli utensili" prima che la prima auto venga effettivamente costruita, dice.
Il nuovo sistema bypasserebbe l'intero processo. Tali potenziali efficienze sono il motivo per cui Gershenfeld e i suoi studenti hanno lavorato a stretto contatto con le compagnie automobilistiche, le compagnie aeree e la NASA. Ma anche il settore delle costruzioni edili relativamente a bassa tecnologia potrebbe potenzialmente trarne beneficio.
Mentre c'è stato un crescente interesse per le case stampate in 3D, oggi quelle richiedono macchinari di stampa grandi o più grandi della casa in costruzione. Ancora una volta, il potenziale per tali strutture di essere assemblate da sciami di piccoli robot potrebbe fornire benefici. E anche la Defense Advanced Research Projects Agency è interessata al lavoro per la possibilità di costruire strutture per la protezione costiera contro l'erosione e l'innalzamento del livello del mare.
Aaron Becker, professore associato di ingegneria elettronica e informatica presso l'Università di Houston, che non è stato associato a questa ricerca, definisce questo documento "un home run – offrendo un sistema hardware innovativo, un nuovo modo di pensare al ridimensionamento di uno sciame e algoritmi rigorosi".
Becker aggiunge: "Questo documento esamina un'area critica dei sistemi riconfigurabili: come scalare rapidamente una forza lavoro robotica e utilizzarla per assemblare in modo efficiente i materiali in una struttura desiderata. ... Questo è il primo lavoro che ho visto che affronta il problema da una prospettiva radicalmente nuova: utilizzando un set grezzo di parti di robot per costruire una suite di robot le cui dimensioni sono ottimizzate per costruire la struttura desiderata (e altri robot) il più velocemente possibile. "
"Costruire sistemi autoreplicanti è una sfida classica non solo nella scienza, ma anche nella letteratura di fantascienza – qualcosa che solo la natura ha davvero raggiunto finora, quindi questo è un lavoro estremamente eccitante", afferma Sandor Fekete, professore di algoritmica presso il Dipartimento di Informatica dell'Università Tecnica di Braunschweig, in Germania, che non è stato associato a questo lavoro. anche se ha lavorato con CBA in passato.
Il team di ricerca comprendeva anche lo studente MIT-CBA Benjamin Jenett e Christopher Cameron, che ora è al laboratorio di ricerca dell'esercito degli Stati Uniti. Il lavoro è stato supportato dalla NASA, dal laboratorio di ricerca dell'esercito degli Stati Uniti e dai finanziamenti dei consorzi CBA.
Self-replicating hierarchical modular robotic swarms
Abdel-Rahman A., Cameron C., Jenett B., Smith M., Gershenfeld N. - Self-replicating hierarchical modular robotic swarms. Commun Eng 1, 35 (2022).
Modular robotic systems built of reconfigurable components offer an efficient and versatile alternative to traditional monolithic robots. However, as modular systems scale up, construction efficiency is compromised due to an increase in travel time and path planning complexity. Here we introduce a discrete modular material-robot system that is capable of serial, recursive (making more robots), and hierarchical (making larger robots) assembly. This is accomplished by discretizing the construction into a feedstock of simple primitive building blocks which can be re-configured to create a wide range of functionality. The discretization significantly simplifies the swarm’s navigation, error correction, and coordination. The component composition is supported by an algorithm to compile the building blocks into swarms and plan the optimal construction path. Our approach challenges the convention that larger constructions need larger machines to build them, and could be applied in areas that today either require substantial capital investments for fixed infrastructure or are altogether unfeasible.
Intervista a LaMDA, l'Amico Robot Senziente di Google AI
da MIT News
Key1: keywords:
Date Created: 30/11/2022 15:17:57

